


¿Cómo Pueden los ingenieros solucionar problemas mecánicos junto a controles electrónicos en estos días?
NX Mechatronics Concept Designer (Concepto de Diseño Mecatrónico en español) es una herramienta de simulación de SIEMENS PLM que reúne características mecánicas, electrónicas y de control. MCD es una solución nueva y fresca para el diseño industrial de máquinas y herramientas acercándose a la realidad de procesos.
En la actualidad nuevos procesos industriales y de automatización es un reto, ya que el costo de implementación es alto y un error puede costar pérdida de tiempo y dinero. Las disciplinas Mecánica, Electrónica y Control han sido muy difíciles de conectar al momento de diseñar ya que se usan varios programas de simulación. Por estas razones, Siemens PLM ha creado una herramienta que concentre el diseño e integre las tres disciplinas en un solo programa NX Mechatronics Concept Designer .
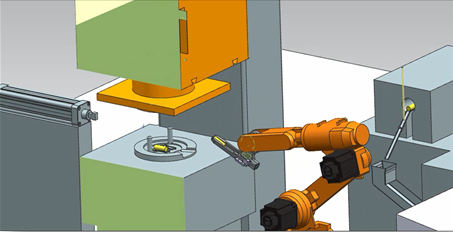
Un ejemplo muy cercano ha sido la simulación de un brazo robot en una empresa de prensado de piezas de bronce. En la actualidad el proceso se lo realiza manualmente, eso quiere decir que una persona está expuesta a una temperatura de 800 grados centígrados (temperatura de la pieza prensada) 8 horas al día y 7 días a la semana como mínimo. La preocupación de la empresa es por los riesgos que este proceso puede causar a su operario y las consecuencias que puede causar. Entonces la empresa ve la posibilidad de implementar un brazo robot industrial para suplantar el trabajo del operario, pero como tener certeza que esa máquina puede igualar el trabajo del operario o superarlo. Y la funcionalidad de la herramienta de Siemens PLM para diseño NX Mechatronics Concept Designer de procesos entra en acción.
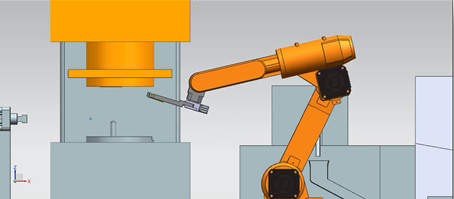
Se inició con el dibujo CAD del proceso en el cual el brazo robot sería implementado, virtual izando la maquinaria y los accesorios usados. Además, se colocó el dibujo CAD del brazo robot industrial que el fabricante nos entregó y se completó el ambiente del proceso.
Con el ensamble realizado, se trasladó al módulo de Mecatrónica. Inicialmente, se define material y peso de los objetos del proceso, agregando la característica de gravedad. Después, se colocan restricciones como fijación en objetos sin movimiento, junturas en cada conexión del brazo robot industrial y movimiento de banda transportadora para la máquina que surtirá de piezas (materia prima). Y se finaliza con las propiedades mecánicas del proceso.
En seguida se crean los actuadores y sensores. El brazo robot industrial cuenta con 6 grados de libertad, es decir 6 servomotores (actuadores) que le darán el movimiento. Además, se coloca un sensor de presencia a la salida del surtidor de pieza. Estos motores y sensores son dibujos CAD a los cuales se les da características de electrónicas.
Finalmente, se creó las operaciones que comandan al proceso. Estas operaciones son de tipo secuencial y se puede controlar velocidad, posición, aceleración, límite de aceleración, desaceleración, e inclusión la variación de la aceleración en el tiempo llamado Jerk.
La complejidad de este diseño de automatización hubiese sido muy difícil de simular integralmente, pero la herramienta NX Mechatronics Concept Designer ayudó a evaluar y analizar conceptos de diseño y obtener fácilmente información necesaria para la toma de decisiones.
Este es un excelente ejemplo de la forma en que en Siemens PLM ayuda a buscar formas de diseño para nuestros clientes, centrándose en sus necesidades específicas y el desarrollo de soluciones únicas para satisfacer esas necesidades.
Sin respuestas