Soporte Online en Servomotores Industriales
te ayudamos con la configuración de parámetros, errores, control de posición, torque, velocidad, puesta en marcha de servomotores Delta, servomotores Panasonic, servomotores Mitsubishi, servomotores Xinje, servomotores Bergerda, servomotores Kinco, servomotores Estun, Servomotores GSK., etc.
Hemos instado servomotores en máquinas de corte, maquianas de impresión, cortadoras de plasma, routers, fresadoras cnc, tornos cnc, bordadoras de hilo para gorras, inyectoras de plástico, prensas, slitter rewinder, maquinas cortadoras de plástico, selladoras de plástico, etc.
Qué es un Servomotor Industrial?.
El servomotor industrial es un accionador físico eléctrico que sirve para controlar con precisión la posición y la velocidad del eje de movimiento, con ventajas de alto torque de momento de fuerza, que permite control de procesos muy fino y con ventajas como cambio de ciclos de posicionamiento por programación de PLCs o sistemas de posicionamiento dedicado, los servomotores eléctricos son DC o AC, los servo motores de última generación son AC a 220 VAC o 380VAC,.
Los servomotores tienen integrado al eje un encoder digital que puede ser Absoluto o Incremental, que sirve de retro alimentación para el lazo PID de control del servo driver.
Los servomotores se utilizan en muchas aplicaciones industriales donde se requiere alta precisión de posicionamiento, altas velocidades de respuesta, control del torque, torque nominal a cero revoluciones por minuto, gracias a estas propiedades se puede mejorar el desempeño de las máquinas y procesos y aumentar la productividad.
Los servomotores son ahorradores de energía eléctrica comparado con los motores de pasos o los motores AC de tres fases (jaula de ardilla), ya que solo consumen energía cuando lo requiere el sistema. Los servomotores cuentan con un sistema de retroalimentación que es el encoder digital, que mide la posición del eje del motor todo el tiempo, por lo que el servo driver hace un control de posición y velocidad, a través de lasos PID; los servomotores logran tiempos de respuesta muy cortos por lo que son ideales para procesos o máquinas donde las aceleraciones y desaceleraciones son muy grandes, normalmente los servomotores logran un control con hasta 300% del torque nominal instantáneo, estas características permiten reemplazar los sistemas mecánicos de freno y embrague como por ejemplo en máquinas selladoras de fundas plásticas, dosificadoras de polvos, máquinas CNC, brazos robot Delta, guillotinas cortadoras de papel, impresoras de papel, etiquetadoras, empacadoras, brazos robot industriales.
Los servomotores no tienen elementos de desgaste como sucede con los motores de corriente contínua o motores con escobillas, por lo que tienen una larga vida útil, ademas son construidos con rodamientos de larga duración, que son libres de mantenimiento, siempre que la instalación sea realizada bajo las condiciones de temperatura, vibración, ubicación, etc. que recomienda el fabricante.
El diseño del rotor de los servomotores está constituido por imánes permanentes de alto campo magnético, del que se obtiene gran torque de arranque y parada para aplicaciones robustas, ademas los servomotores tienen carcasas de aluminio para disipar el calor interno generado, dependiendo de las condiciones ambientales se requiere ventilación forzada para evitar calentamiento excesivo de los servomotores.
Los encoder absolutos que tienen algunos modelos de servomotores sirven para aplicaciones donde se requiere saber en todo momento la posición absoluta del servomotor como por ejemplo en máquinas CNC de altas prestaciones y varios ejes de control, para evitar la búsqueda de la posición cero (Home position) cada vez que se vaya la energía eléctrica o exista una condición de falla. También en aplicaciones industriales donde es muy importante mantener siempre una posición absoluta como por ejemplo en los brazos robot industriales, cortadoras, etc.
Los servomotores pueden ser controlados por Motion Controllers o controladores de movimiento, PLCs, con salidas rápidas y módulos de posicionamiento o controladores numéricos como el caso de los tornos o fresadoras cnc, los mismos que a traves de señales digitales mandan la posición al servo driver y gracias a estas señales el driver posiciona a los servomotores, existen dos tipos de señales de control digitales o analógicas, las primeras por frecuencia de pulsos y dirección y la segunda por voltaje.
Se deben dimensionar los servomotores por el torque nominal, la velocidad máxima, y la potencia, según la aplicación se debe tomar en cuenta estos parámetros, ya que no podemos sobrepasar el torque nominal en trabajo estable, por lo que se agregan mecanismos para aumentar el torque, por ejemplo poleas sincrónicas, cajas reductoras, engranajes, etc. Hay que tomar en cuenta que al tener una relación de transmisión de aumento de torque, también se tiene una relación de transmisión de reducción de velocidad, por ejemplo en máquinas selladoras de fundas se debe tener en cuenta esto para la precisión del corte de las fundas.
Algunos modelos de servomotores disponen de frenos mecánicos para evitar o bloquear el movimiento en máquinas o procesos donde se requiere que frene de inmediato al quitar la energía, esto se aplica para ascensores, el eje Z de los centros de mecanizado, cuchillas de corte de máquinas convertidoras de papel higiénico, y aplicaciones donde es crítico el frenado.
Los nuevos diseños de máquinas donde se tienen muchos ejes de movimiento y es indispensable el control individual de torque, posición y velocidad, se usan servomotores individuales para cada eje ya que los sistemas antiguos de engranajes o bandas no permiten ajustar los parámetros de velocidad, torque o posición individualmente. es el caso de máquinas procesadores de pañales, papel higiénico, empaquetadoras, etc. Aquí es muy importante el sistema de servomotor maestro-esclavo, donde un servomotor hace de eje maestro y otro lo sigue, mediante engranes virtuales podemos controlar la relación de transmisión entre un eje de movimiento del un servomotor y el eje del servomotor esclavo. Esto se logra con controladores de movimiento específicos como el XCC de Xinje. En estos sistemas de seguidor es muy importante el control del error de la posición del servomotor, por lo que un ajuste de los parámetros PID de los lazos de control adecuados permite minimizar el error y tener un sistema servomotor maestro – esclavo ideal.
Cómo funcionan los servomotores?
El servo motor hace referencia a un sistema compuesto por un motor eléctrico, un sistema de regulación que actúa sobre el motor y un sistema de sensor que controla el movimiento del motor. Es precisamente este sensor el que marca la diferencia con respecto a un motor controlado electrónicamente, ya que gracias a la información obtenida del sensor, se puede saber en tiempo real lo que está haciendo un motor.
Se caracterizan por su capacidad para posicionarse de forma inmediata en cualquier posición dentro de su intervalo de operación. Para ello, el servomotor espera un tren de pulsos que se corresponde con el movimiento a realizar. Están generalmente formados por un amplificador, un motor, un sistema reductor formado por ruedas dentadas y un circuito de realimentación.

Las características principales de un servomotor son:
El par (torque) y la velocidad (revoluciones por minuto).
El par es la fuerza capaz de hacer en su eje, también se lo puede llamar torque. A mayor par, mayor corriente de consumo del servo, pero no suelen consumir mucho, dependiendo del tipo de servomotor.
Los servomotores son utilizados en las más variadas aplicaciones industriales donde una elevada dinámica, control de par, precisión de velocidad y posicionamiento son factores decisivos para el aumento de la calidad y productividad.
Poseen todas estas características aliadas a un bajo costo, elevado desempeño y robustez.
Los servomotores son usados con retroalimentación para así cerrar el lazo. La señal de retroalimentación provee información al control para monitorear el proceso y llevar a cabo tareas con mayor precisión, por ejemplo, realiza mediciones a las tareas que el motor está realizando. El comando y la señal de retroalimentación son comparadas y luego el control envía una señal de corrección para compensar cualquier error. Esto permite mejorar la precisión en las aplicaciones.
Así, los servomotores representan la mejor inversión en productividad a largo plazo.
Curso de Servomotores Industriales Funcionamiento y Uso desde Cero
En el Curso Básico de Funcionamiento y Uso de Servomotores Industriales aprenderás el funcionamiento, las partes, programación, tipos de control, ejemplos prácticos.

Servomotores versus Motores de Pasos
A diferencia de los motores paso a paso, los servomotores tienen un torque constante desde su velocidad de reposo, hasta su velocidad nominal. Pueden generar torques instantáneos de hasta tres veces el nominal, lo que les da excelentes características de aceleración / desaceleración.
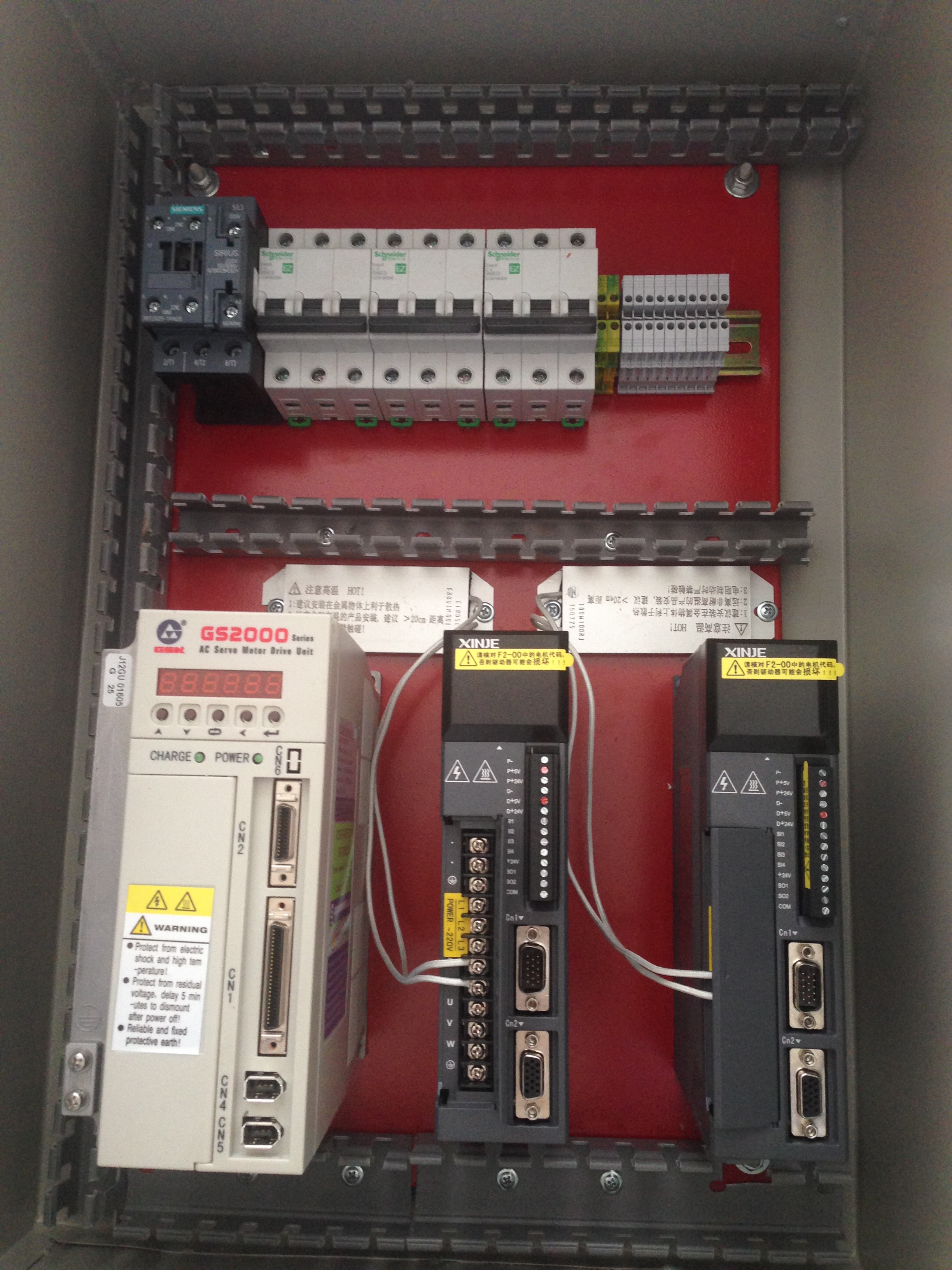
Adicionalmente los Drivers GS2000 contienen 3 lazos de control PID completos para la posición, velocidad, torque, tienen retroalimentación de posición a través de un encoder óptico (incremental o absoluto según el modelo) que viene incorporado en el motor y tienen adaptación por parámetros a diferentes entornos de carga. Se alimentan con 220VAC monofásicos, o con trifásica de 220VAC dependiendo de la potencia requerida.
Servomotores GSK
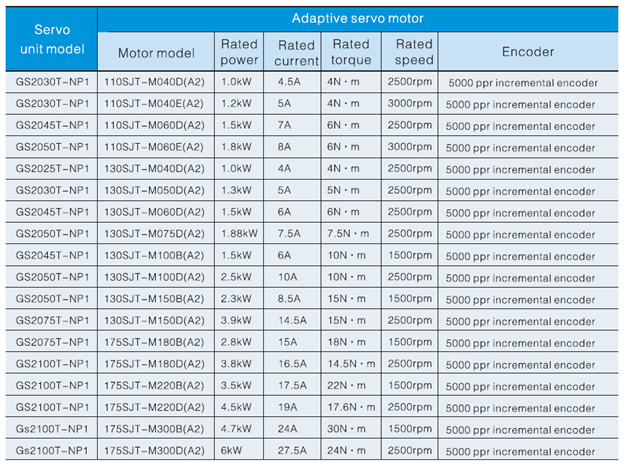
Serie SJT y drivers GSK GS2000T La serie SJT va desde 0.2Kw hasta 6 Kw. Adicionalmente los Servo Drivers GS2000T tienen un control PID completo, poseen realimentación de posición a través de un encoder óptico que viene incorporado en el motor, una gran capacidad del mecanismo impulsor y emisión del calor , sus parámetros se adaptan a diferentes entornos de carga. Se alimentan con 220VAC monofásicos, o con trifásicos dependiendo de la potencia requerida. Los motores vienen con su correspondiente driver en las siguientes configuraciones:

Serie 110SJT: (brida de 110x110mm) GS2030T-NP1 / 110SJT-M040D(A2) x 4Nm, 2500 Rpm, 1000W GS2045T-NP1 / 110SJT-M060D(A2) x 6Nm, 2500 Rpm, 1500W Serie 130SJT: (brida de 130x130mm) GS2025T-NP1 / 130SJT-M040D(A2) x 4Nm, 2500 Rpm, 1000W GS2045T-NP1 / 130SJT-M100B(A2) x 10Nm, 1500 Rpm, 1500W GS2050T-NP1 / 130SJT-M150B(A2) x 15Nm, 1500 Rpm, 2300W Serie 175SJT: (brida de 175x175mm) GS2100T-NP1 / 175SJT-M220B(A2) x 22Nm, 1500 Rpm, 3500W GS2100T-NP1 / 175SJT-M300B(A2) x 30Nm, 2500 Rpm, 6000W.

Servomotores Xinje
Especificaciones técnicas de los servomotores Xinje

Características de los servomotores Xinje
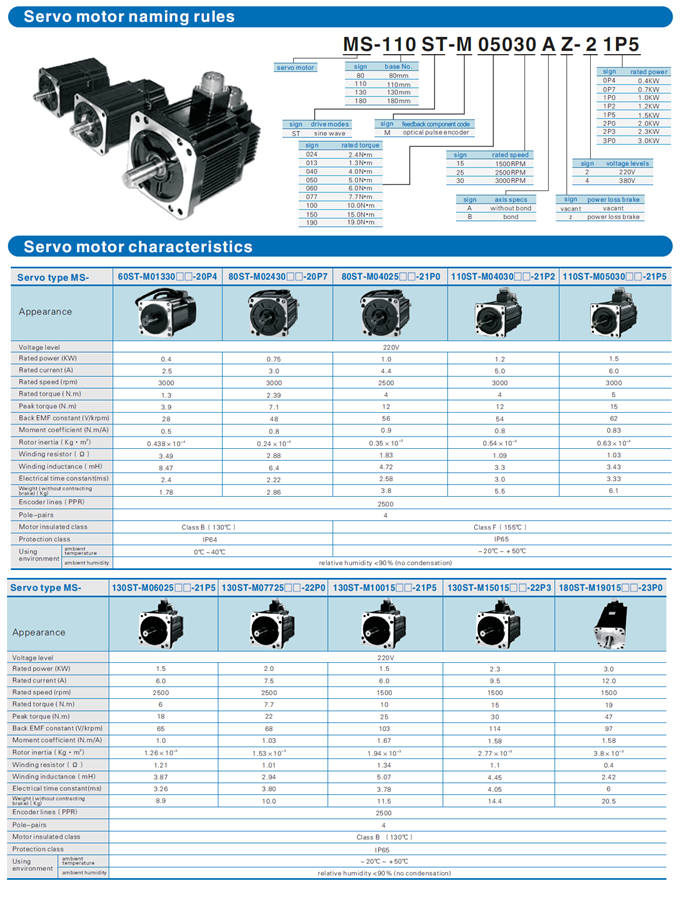
Disponemos de varios modelos de servomotores como: MS60 servomotor de 200W con unidad de servo drive DS2 monofásico o trifásico de 220VAC y encoder es 2500 ppr. MS110 servomotor de 1000W con unidad de servo drive DS2 monofásico o trifásico de 220VAC y encoder es 2500 ppr. MS130 servomotor de 2300W con unidad de servo drive DS2 trifásico o trifásico de 220VAC y encoder es 2500 ppr.
Curso de Servomotores Industriales Funcionamiento y Uso desde Cero
En el Curso Básico de Funcionamiento y Uso de Servomotores Industriales aprenderás el funcionamiento, las partes, programación, tipos de control, ejemplos prácticos.